



 by
by If you’re having trouble understanding the concept of the axis of rotation, here is a simplified explanation. This concept builds upon an understanding of the planes of motion and the various types of movements at the joints, so be sure to learn those first before taking on the three axes of rotation.
Axis of rotation can be a difficult concept to grasp because it is an imaginary entity. In reference to human anatomy, axis of rotation is an imaginary line that projects through the pivot/rotation point in a joint (for example, the axis of rotation for flexing and extending the arm projects through the elbow joint). Each movement in the three planes of motion (i.e., sagittal, frontal, and transverse) occur about an axis of rotation. The movement itself—which, of course, is not imaginary—occurs in an imaginary plane of motion that is perpendicular to the imaginary axis of rotation. This means that both imaginary components—the plane and the axis—intersect to create a right (90°) angle. In the elbow example, the forearm moves in the sagittal plane of motion as the elbow joint (through which the axis of rotation occurs) flexes and extends. That is, the arm moves in the sagittal plane of motion around an axis of rotation that occurs at the elbow, which allows for flexion and extension. Because flexion and extension occur in an anterior and posterior direction, respectively, the axis of rotation is perpendicular to it and projects through the joint in a mediolateral, or side-to-side direction. Hence, for the elbow, movement occurs in the sagittal plane (as flexion and extension) around a mediolateral axis of rotation.
Just as there are three planes of motion, there are three axes of rotation: the anterior-posterior axis, the mediolateral axis, and the longitudinal axis. Joints rotate in these axes, allowing movement to occur in the planes.
Anterior-posterior Axis
also known as the Sagittal Axis or Anteroposterior Axis
Imagine a pin that inserts through a joint from front to back (anteriorly and posteriorly), effectively pinning down the joint to limit its potential freedom of motion. For example, you can think of a pin entering through the front of the hip joint and exiting out the back. Because of the pin’s position, the only movement allowed about this axis is lateral movement (abduction or adduction) in the frontal plane.
Mediolateral Axis
also known as the Transverse Axis
Mediolateral means that we take our imaginary pin and insert it from a lateral, or side approach. As in the earlier elbow example, the axis projects from the medial side of the joint and extends out the lateral side. The position of the pin allows only forward and backward movement (flexion and extension) in the sagittal plane about this axis.
Longitudinal Axis
If we insert our pin through the joint from top to bottom, it will allow movement in transverse plane only (i.e., rotation). Imagine a long pin entering the top of the cervical spine and exiting out the lumbar spine. The pin would effectively prevent the spine from bending forward, backward, or side-to-side, but it would allow the spine to twist along a transverse plane.
Joints rotate in these axes, allowing movement to occur in the planes. Some only rotate in one axis, while others rotate in multiple axes.
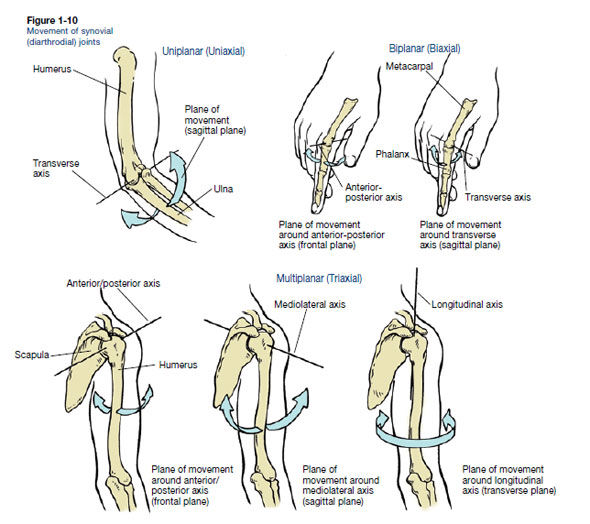
Uniaxial or uniplanar joints (also called hinge joints) rotate in one axis, allowing movement in one plane. The elbow joint is a hinge joint because it only allows movement forward and backward (flexion and extension) in the sagittal plane.
Biaxial or biplanar joints rotate in two axes, allowing movement in two planes. The foot and hand are examples of biaxial/biplanar joints. They both move laterally, or side-to-side, in the frontal plane and forward and backward (flexion and extension) in the sagittal plane.
Multiplanar or triaxial joints rotate in all three axes allowing movement in all three planes. The shoulder joint is an example of a multiplanar/triaxial joint. It allows forward and backward movement in the sagittal plane, lateral, or side-to-side movement, in the frontal plane, and internal and external rotation in the transverse plane.




 by
by